摘要

关键词
- 生物弹性结构 (Bioelastic structures)
- 触觉替代 (Haptic substitution)
- 可穿戴设备 (Wearable devices)
- 双稳态传感器 (Bistable sensors)
- 机械感受器 (Mechanoreceptors)
研究背景
触觉替代技术通过激活皮肤内的机械感受器实现对环境信息的感知,已广泛应用于增强虚拟现实、游戏及社交媒体等领域。然而,现有设备多依赖电磁、静电或气动方法,受制于能耗、体积及灵敏度等问题。本研究开发的生物弹性结构将皮肤作为机械元件之一,通过低能耗方式实现双稳态变形,显著提升触觉替代设备的适用性和舒适性,尤其适用于视觉或本体感觉受损人群。
创新点
- 提出了结合皮肤弹性与双稳态变形机制的全新设计。
- 实现了对快速和缓慢适应机械感受器的多模态刺激。
- 设备支持无线控制,可集成智能手机传感数据。
- 优化了低能耗运行方案,并验证了其适用性。
研究内容
本研究提出了一种结合皮肤弹性特性的双稳态生物弹性结构,设计通过一个包含核心、电枢与膜片的机械结构与皮肤耦合,在压缩状态和放松状态间形成双稳态变形。设备通过磁场操控实现状态转换,自感应模块可记录变形状态并优化驱动电流。将该结构集成至一个由19个单元组成的无线触觉阵列,通过蓝牙连接至智能手机,从3D扫描与惯性测量单元中获取环境信息,并将其转化为触觉刺激。实验表明,该阵列可通过压缩、振动与扭转的多模式操作,对不同受损感知任务(如视觉、姿势控制及脚步调整)提供准确且实时的触觉反馈。
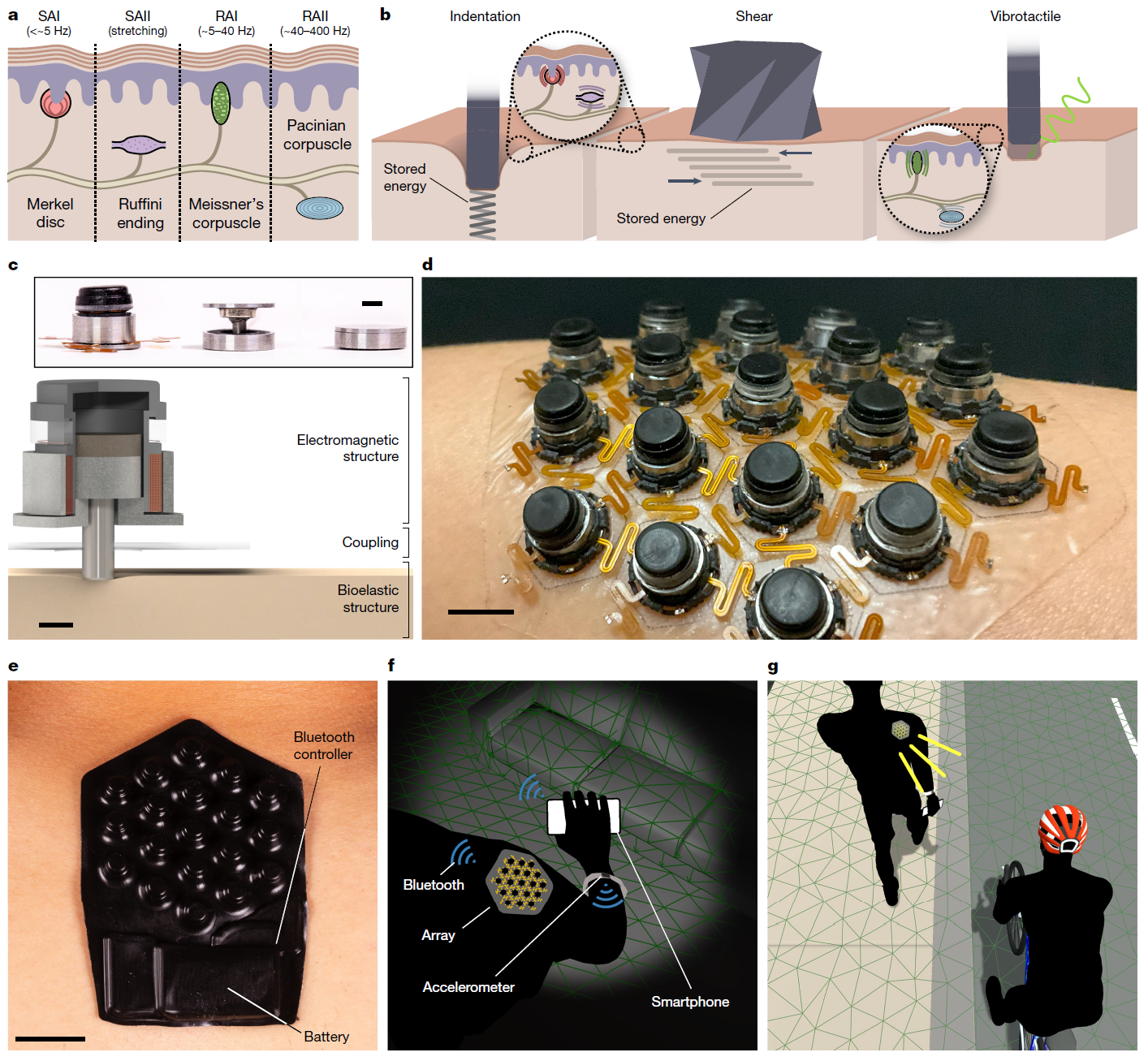
(a) 皮肤机械感受器及其频率响应的示意图。
(b) 触觉作用模式,展示了针对不同机械感受器的激活。
(c) 双稳态换能器的拆解视图,展示了以皮肤为核心机械组件的设计原理。插图显示了原始换能器(左)与迷你化设计的对比图(中和右分别为放松和压缩状态)。比例尺:2 mm。
(d) 肩部安装的换能器阵列的照片。比例尺:7 mm。
(e) 颈部安装的封装界面的照片。比例尺:2 cm。
(f) 融合了换能器阵列、加速度计和3D扫描(智能手机)的系统,用于感官替代的示例。所有组件通过低功耗蓝牙协议相互连接。
(g) 用于感官增强的系统示例,可检测用户视野外的物体。

(a) 双稳态换能器的拆解视图,展示关键机械组件。
(b) 自由体图及与每种状态和过渡相关的势能示意图。
(c) 为克服能量屏障并达到每种状态所需的最小电流与总压缩深度的关系。
(d) 显示不同参数下实现双稳态的区域图。
(e) 在6名健康参与者(3男3女,20-36岁)的3个皮肤部位上的机械双稳态性能评估。
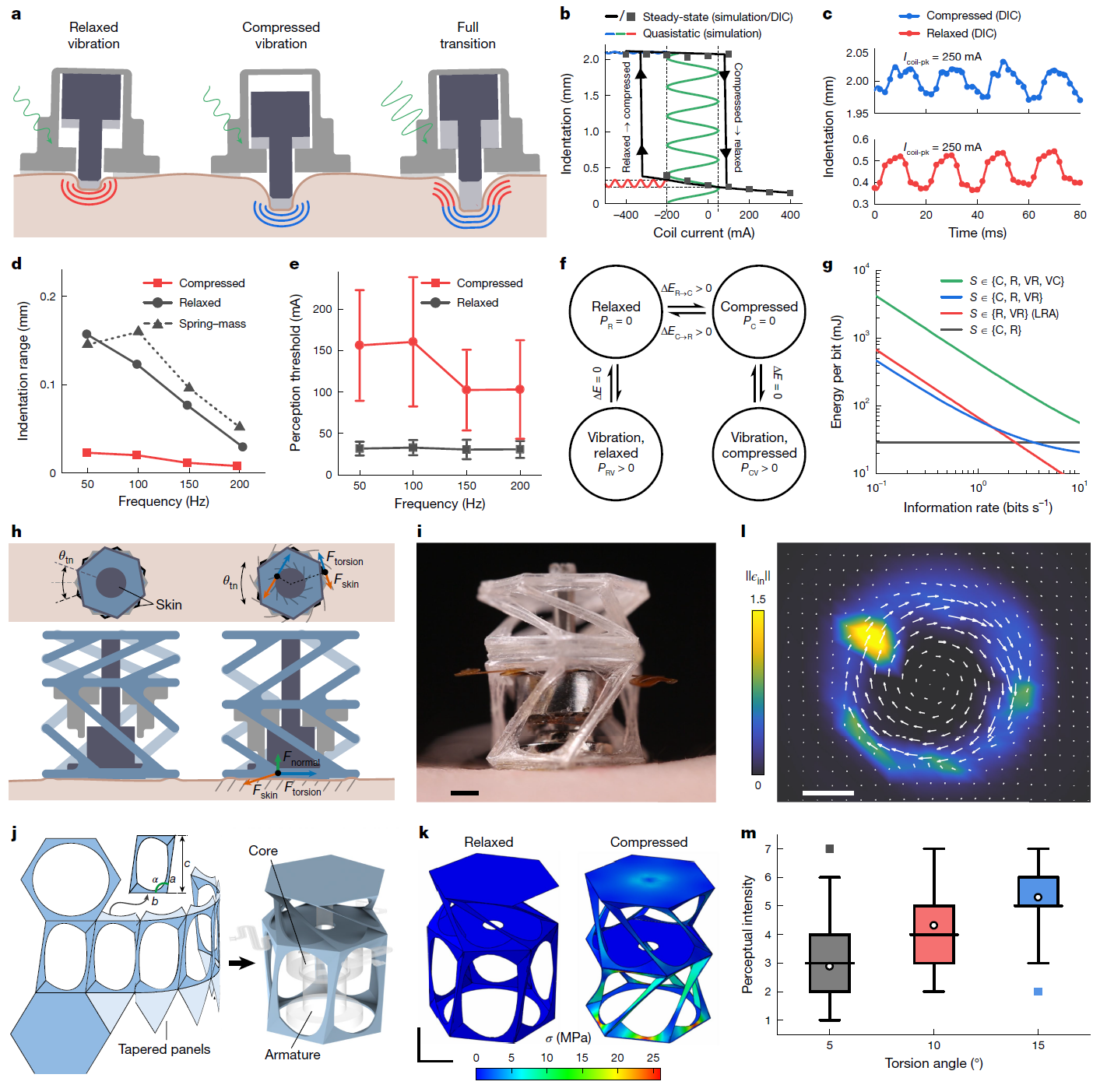
(a) 换能器在三种振动模式下的示意图。
(b) 系统在扫描线圈电流时的稳态和准静态行为,显示出迟滞现象。
(c) 振动中每种状态下的变形时间特性。
(d) 振动变形的频率特性。
(e) 人类参与者感知阈值的振动电流幅度。
(f) 每种状态相关的连续功耗与过渡能量的状态图。
(g) 不同信息传输率下的能耗比较。
(h) 换能器的扭转模式示意图。
(i) 集成切纸结构的照片。比例尺:2 mm。
(j) 平面切纸图案组装为3D切纸结构的过程。
(k) 通过有限元分析驱动切纸结构内的应力变化。比例尺:3 mm。
(l) 皮肤假体上的平面应变分布。比例尺:2 mm。
(m) 人类参与者对符合变形特性触觉元件的感知强度报告。
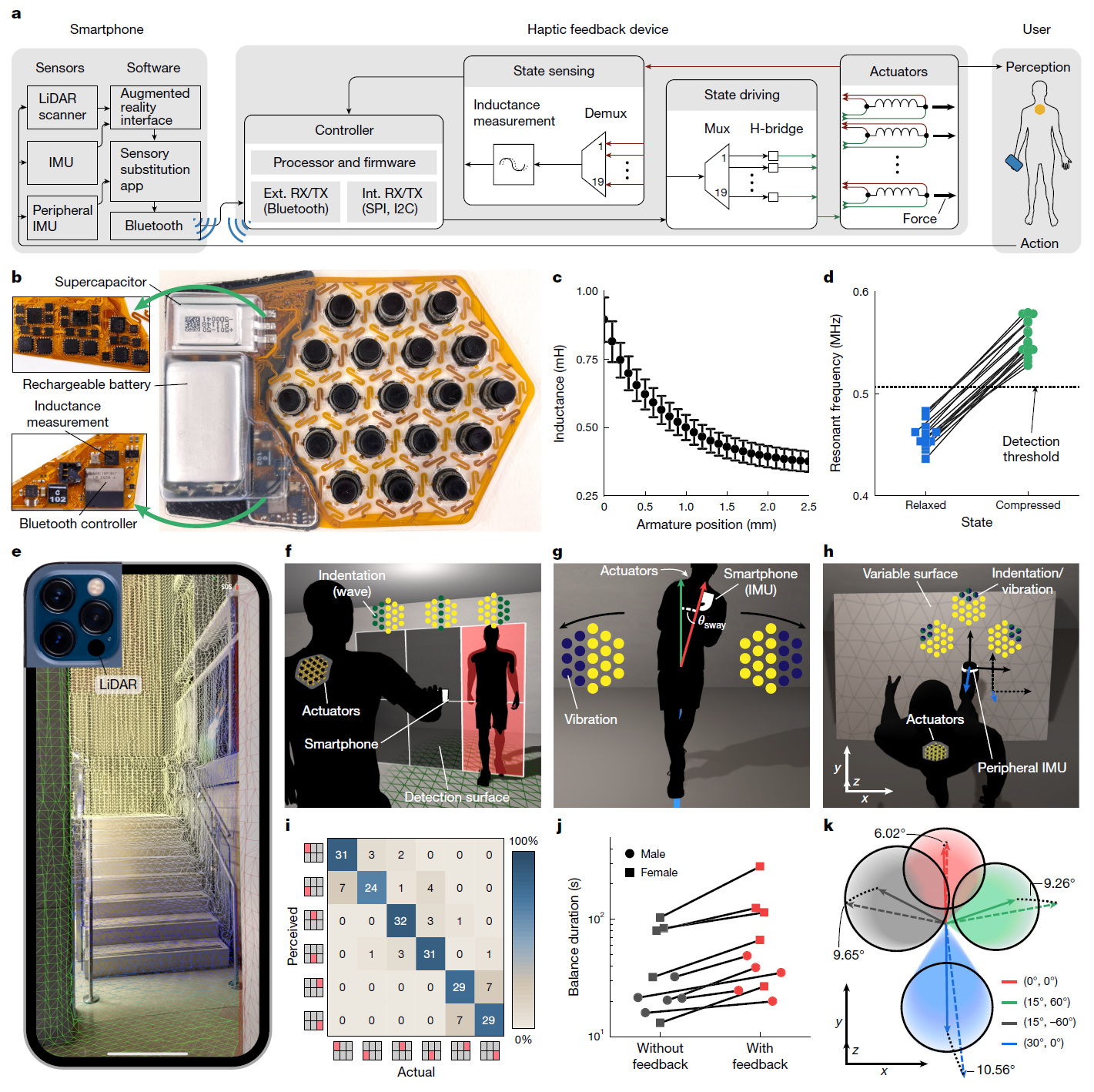
(a) 闭环控制系统和蓝牙通信的状态图。
(b) 集成了驱动电子设备和闭环控制系统的换能器阵列照片。
(c) 换能器随转子位置变化的电感测量值。
(d) 使用集成控制器对19个换能器进行的谐振频率测量。
(e) 通过智能手机内置LiDAR进行场景重建的照片。
(f) 可视感官替代任务的实验设置和刺激模式(压缩波)。
(g) 平衡感官替代任务的实验设置和刺激模式(振动)。
(h) 足部着陆感官替代任务的实验设置和刺激模式(振动和压缩)。
(i) 参与者在视觉任务中的表现混淆矩阵,颜色地图显示发生频率。
(j) 平衡任务中参与者的平衡持续时间对比。
(k) 足部着陆矢量随目标表面俯仰和偏航变化的结果。
结论与展望
本研究通过设计生物弹性结构与双稳态机制,突破了传统触觉设备的能耗和多功能性限制。实验验证了其在视觉替代、姿态控制及本体感觉补偿中的优异表现。未来研究将聚焦于进一步缩小设备尺寸和优化能量回收效率,为触觉增强技术的广泛应用提供支持。
论文直达
原文标题:Bioelastic state recovery for haptic sensory substitution
Nature 2024, 635, 345–352.
点击以下链接阅读原文: