摘要
关键词
- 像素化颜色转换 (Pixelated colour conversion)
- 光场传感 (Light-field sensing)
- 全无机钙钛矿纳米晶 (All-inorganic perovskite nanocrystals)
- 三维成像 (3D imaging)
- 相位对比成像 (Phase-contrast imaging)
- X射线检测 (X-ray detection)
研究背景
光场检测能够同时测量光线的强度和方向,在三维成像、光学雷达和相位对比成像等领域具有重要应用。然而,传统方法需要复杂的微透镜阵列或仅限于紫外-可见光波段,难以拓展至高能波段。近年来,钙钛矿纳米晶凭借其优异的光电性能成为新型光场传感材料的候选。本研究利用钙钛矿纳米晶阵列的颜色转换特性,提出了一种新型光场传感器,并探索其在多种应用场景中的潜力。
创新点
- 实现了从X射线到可见光波段的光场检测。
- 采用像素化颜色转换技术,通过颜色编码光束方向。
- 提出了一种简单且可扩展的基于钙钛矿纳米晶阵列的光场传感方法。
- 实现了高角分辨率(0.0018°)和宽波长范围(0.002–550 nm)的检测。
研究内容
本研究设计并制备了全无机钙钛矿纳米晶阵列,通过颜色转换实现从X射线到可见光的光场检测。研究首先合成了三种不同发射波长的钙钛矿纳米晶,并将其制备成微阵列以实现对入射光角度的高分辨率检测。通过结合颜色CCD,实现了基于像素化颜色转换的光束三维方向检测,并进一步拓展至三维物体成像和相位对比成像的应用。实验表明,该方法具有高精度的深度分辨率(0.5 mm),并在多种场景中展现出优异的成像性能。此外,研究还证明了该传感器在多色光束方向检测和波前测量中的潜力。
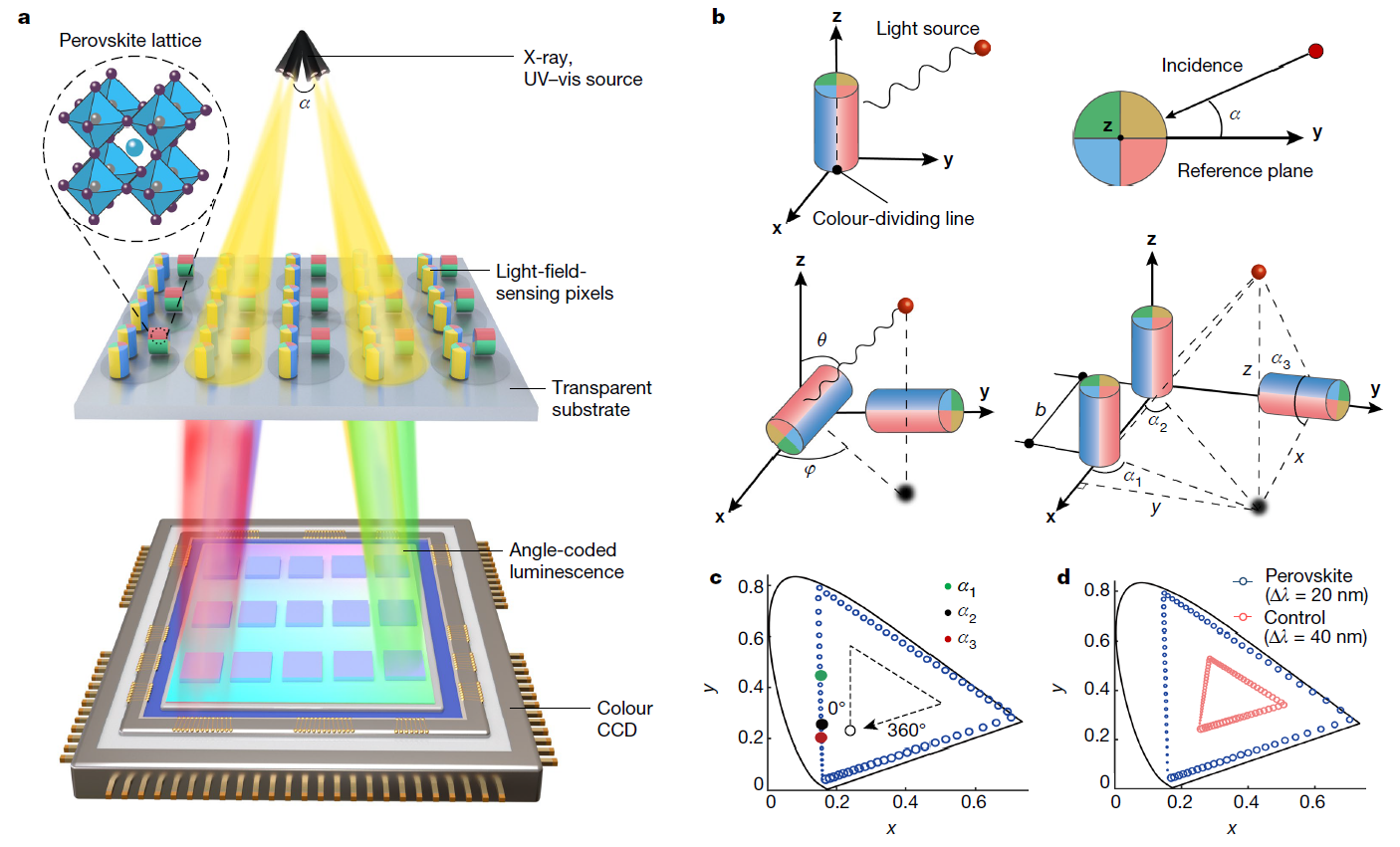
(a) 基于像素化颜色转换的 3D 光场传感器设计。光场感知像素由透明膜上的钙钛矿纳米晶图案组成,可将不同方向的光转换为不同颜色的发光信号,由彩色 CCD 检测。
(b) 通过颜色转换进行光场感知的工作原理。3D 光场传感器的基本单元是一个由多色发光钙钛矿纳米晶组成的单个方位探测器。输出光的颜色取决于入射光与参考平面之间的角度 α。两组垂直排列的方位探测器可实现 3D 光场感知,并确定球坐标中入射光的方位角 φ 和仰角 θ。通过布置三个方位探测器,可利用三个方位角 α1、α2 和 α3> 的颜色输出相关性检测光源的绝对位置 (x, y, z)。
(c) 单个方位探测器在 0° 至 360° 入射光条件下的色度响应。红色、绿色和黑色点分别对应于 (b) 中三个方位探测器记录的方位角 α1、α2 和 α3。
(d) 由钙钛矿纳米晶制成的单个方位探测器在 0° 至 360° 入射光条件下的色度响应,与由 ZnS:Cu2+/Mn2+ 和 SrAl2O4:Eu2+/Dy3+ 磷光体制成的控制样品的对比。
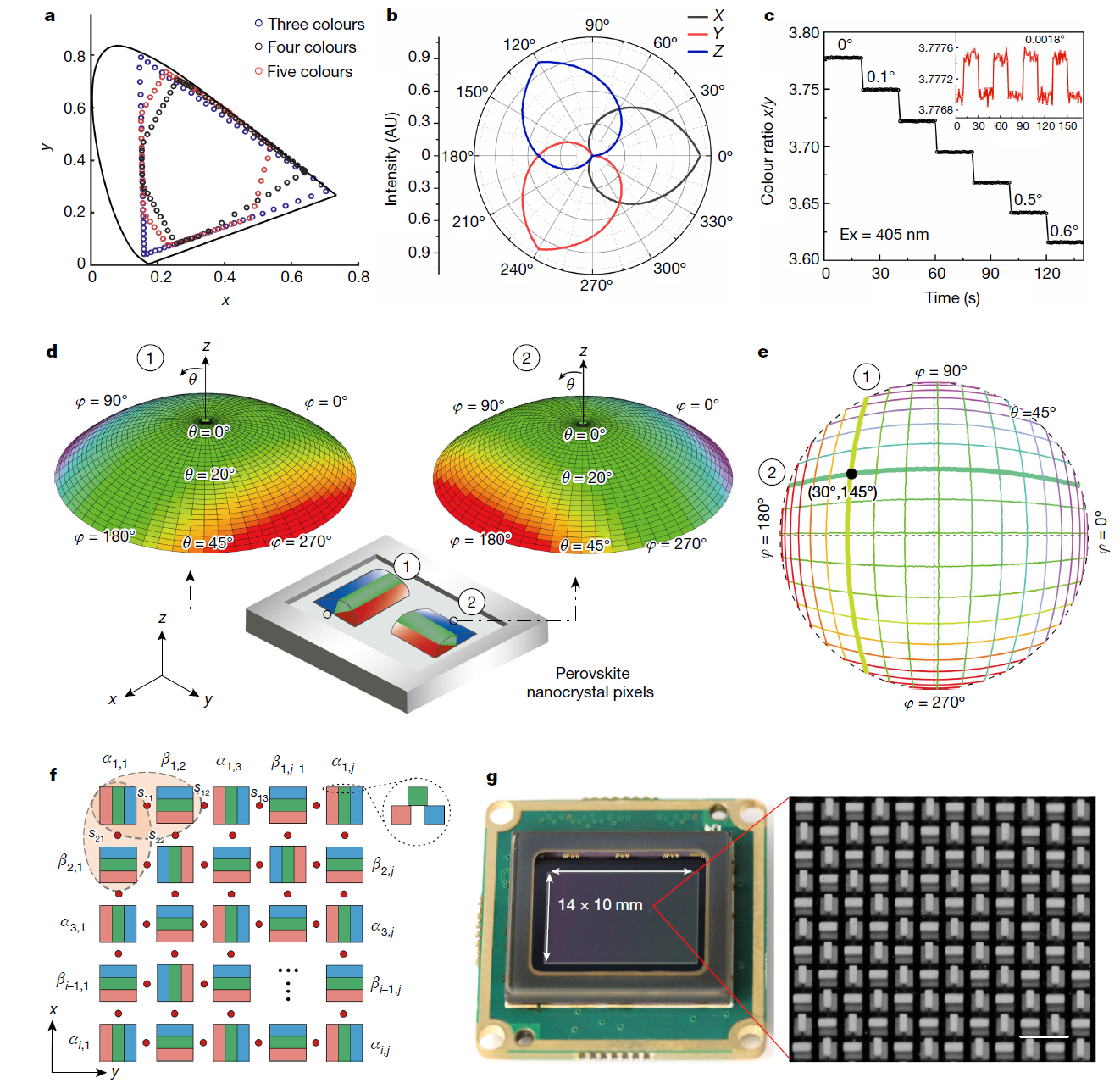
(a) 由三色、四色和五色钙钛矿纳米晶组成的单个方位探测器在入射光方向下的色度响应。
(b) 单个方位探测器的输出发光的 CIE XYZ 三刺激值与入射光方向的关系。AU,任意单位。
(c) 使用单个方位探测器对可见光(405 nm)的方位分辨率测量,最小可检测角度变化为 0.0018°。激发波长 (Ex),450 nm。
(d) 来自两组垂直排列的方位探测器记录的光线以不同方位角 φ 和仰角 θ 入射的两种颜色图。
(e) 从 (d) 中提取的两种颜色图的等高线。通过组合两组方位探测器的颜色值可确定唯一的入射方向。
(f) 用于 3D 光方向成像的方位探测器阵列的俯视图,其中相邻的钙钛矿纳米晶像素垂直排列。椭圆圈出的两个探测器可确定入射到椭圆中心点的光束角度。插图为图案化像素的侧视图。
(g) 通过将钙钛矿纳米晶阵列集成到彩色 CCD 中制造的 3D 光场传感器的照片。插图为基于纳米晶的方位探测器的显微图像部分。比例尺,150 μm。
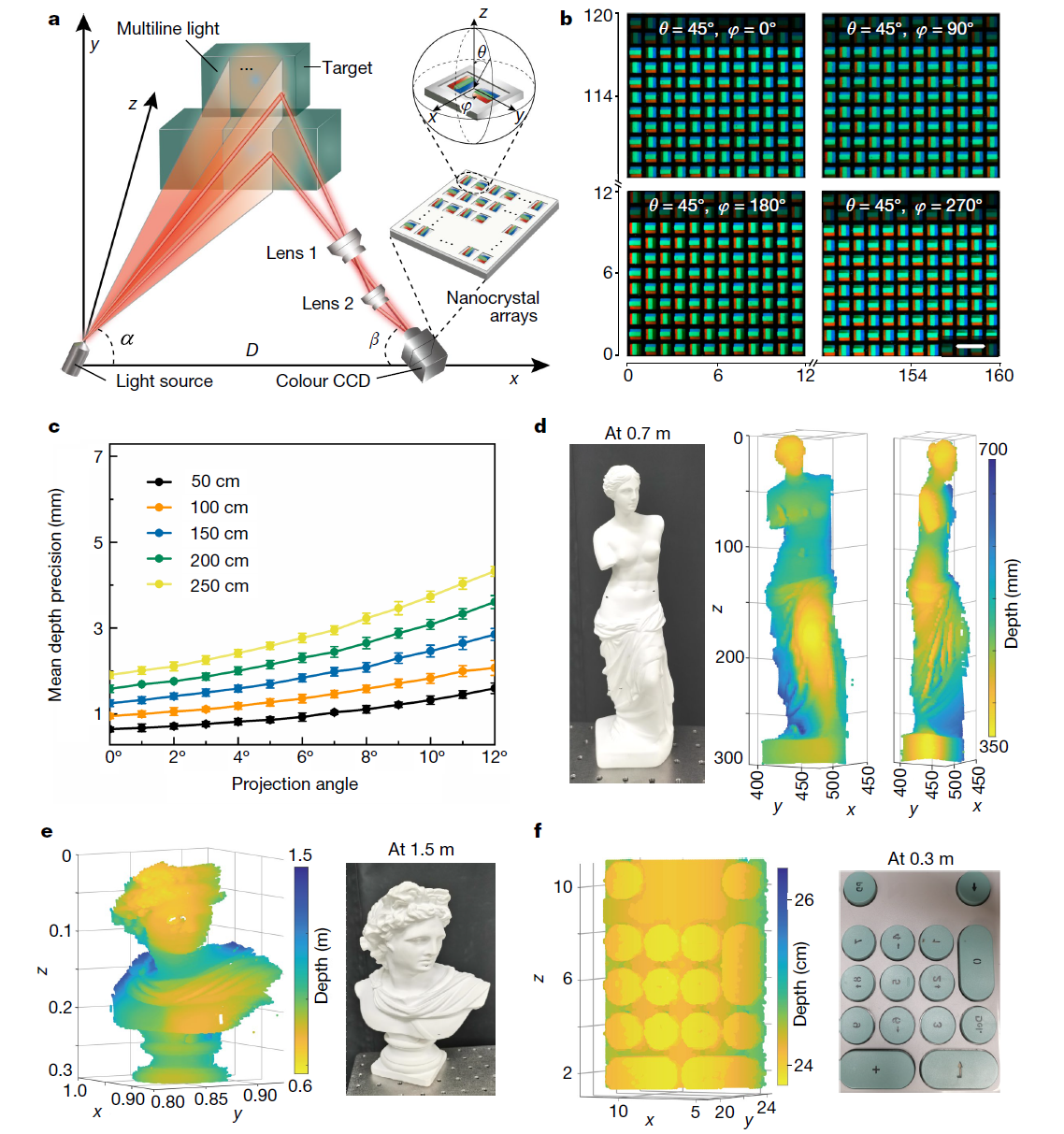
(a) 实验装置示意图。多线结构光入射到物体上;透镜 1 和透镜 2 收集反射光并将其传递到钙钛矿纳米晶阵列。彩色 CCD 随后测量每个方位探测器的颜色以计算与场景的相应距离。
(b) 来自不同方向入射光的钙钛矿纳米晶阵列的代表性图像。
(c) 场景深度和视场径向位置的函数关系上的平均深度精度图。可移动的白色平面屏幕用作目标物体。对于每个投影角进行了十次测量,对于每个深度进行了 20 次测量。数据为平均值 ± 标准误差。
(d, e) 分别在 0.7 m 和 1.5 m 放置场景的三维图像。
(f) 使用 3D 光场传感器捕获的键盘的 3D 深度图像。颜色图表示从成像点到原点的 z 轴(x = 0, y = 0)的距离。比例尺,150 μm (b)。
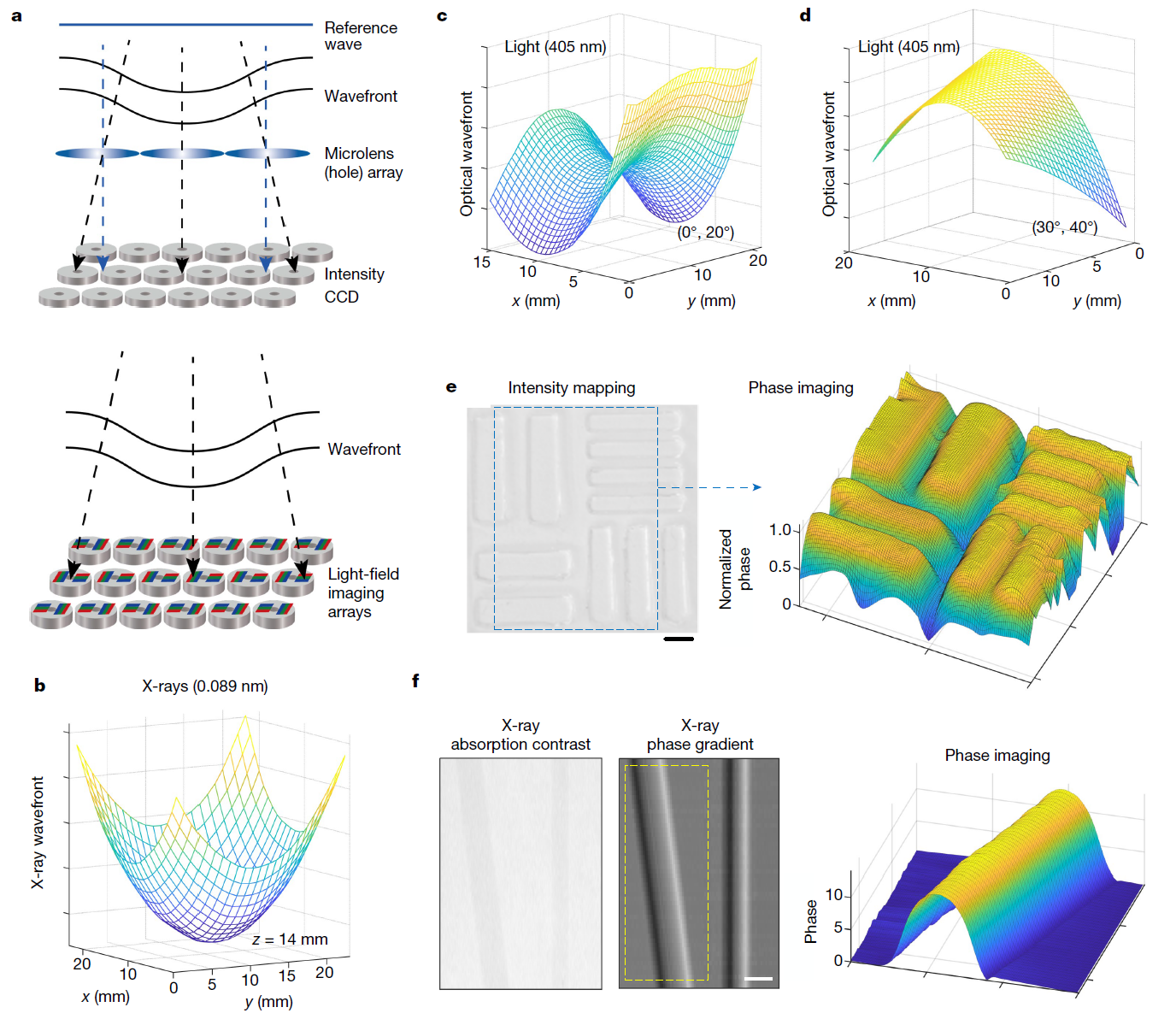
(a) 哈特曼或沙克-哈特曼波前成像的原理(上图)和基于 3D 光场传感器阵列的波前成像(下图)。
(b) 在 X 射线源 14 mm 处测量的发散波前。
(c, d) 当透镜在 (Fx = 0°, Fy = 20°) 和 (Fx = 30°, Fy = 40°) 的场角下被可见光照射时,在成像平面上测量的波前。Fx 和 Fy 分别表示 x 和 y 方向的场角。透镜的焦距和孔径分别为 60 mm 和 25.4 mm。
(e) PDMS 基板图案的光学强度图像(左)及其用 3D 光场传感器测量的相位分布图(右)。表面结构的厚度为 0.6 mm,激光波长为 405 nm。
(f) 两个商用 PMMA 棒(直径分别为 1 mm 和 2 mm;50 kV X 射线)的吸收对比图像及其用 3D 光场传感器测量的相位梯度图。黄色虚线框区域的相位成像通过补充信息中的公式 (32) 实现。比例尺,1 mm (e)。
结论与展望
本研究提出了一种基于钙钛矿纳米晶阵列的像素化颜色转换方法,成功实现了光场检测、三维成像以及从可见光到X射线的相位对比成像。该技术不仅具有较高的角分辨率和宽光谱响应范围,还具备广泛的应用潜力,包括生物成像、光学检测和卫星导航。未来的研究将重点探索该技术在近红外及更长波长范围的扩展,同时提高传感器的空间分辨率和角分辨率。
论文直达
原文标题:X-ray-to-visible light-field detection through pixelated colour conversion
Nature 2023, 618, 281–286.
点击以下链接阅读原文: